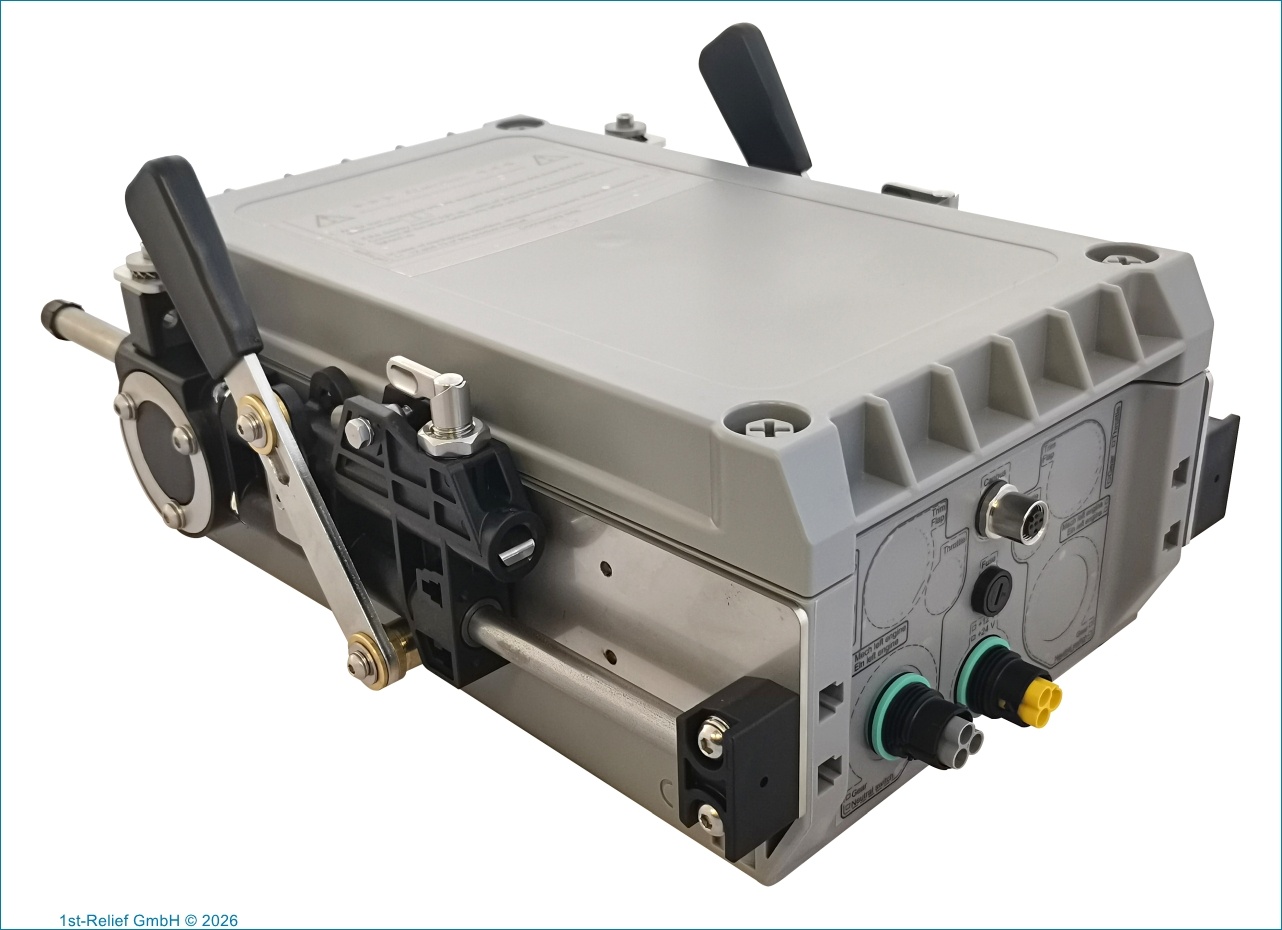
Actuador para el control de un solo motor de la nave (1 x acelerador, 1 x marcha)
Este actuador transforma la señal eléctrica de la unidad de control (n.º de pieza: 1st254500.C-200005) en el movimiento mecánico necesario en el motor. La conexión electrónica a la unidad de control se realiza mediante cables CAN-Bus (n.º de pieza: 1st253500.33-05000). Para la conexión mecánica al motor se utilizan cables de empuje y tracción (cables Bowden) (n.º de pieza: 1st25E3X-nnX).
Por supuesto, también ofrecemos un sistema de control remoto adecuado (Número de pieza: 1st25WRC6F).
Propuesta de planificación y diseño en 1 día hábil, gratis.
Con mucho gusto le elaboraremos una propuesta de planificación y diseño sin costo alguno en un plazo de un día hábil. Por favor, envíenos la siguiente información por correo electrónico ([email protected]):
Áreas que se controlarán mediante el mando a distancia:
- Motor(es)
- Cabrestante(s) de ancla
- propulsor de proa
- propulsor de popa
Tipo de yate:
Tipo de casco:
- Monocasco
- Catamarán
- Trimarán
Fabricante y modelo del yate (descripción, número):
Número de motores:
Fabricante y modelo del motor:
Tipo y número de cabrestantes de ancla:
Tipo y número de propulsores de proa y popa:
Conexión entre el motor y la palanca de dirección en el timón:
- mediante cable de varilla de empuje (cable Bowden)
- mediante la dirección electrónica
Descripción del cabezal de dirección electrónico (por ejemplo, "TeleFlex Morse 12V Modelo nnn"):
Número de puestos de control:
Vídeo explicativo
En este vídeo, 1st-Relief muestra la conversión del control del motor de un yate, pasando de un actuador mecánico a un sistema eléctrico (alimentado por Flexball), basado en un sistema de doble motor de catamarán. En este vídeo se muestran tres variantes:
2 motores, 1 cabezal de control
2 motores, 2 cabezales de control
2 motores, 2 unidades de control y control remoto completo.
Información del fabricante
- Fabricante: Flexball
- Número de pieza: 4600.A-084049